How to Choose the Right Stepper Motor Rotor for Your Project?
Choosing the right stepper motor rotor for your project is crucial. The stepper motor rotor significantly affects performance and efficiency. It is essential to understand the specific requirements of your application.
Different projects may demand varied rotor types. Factors like torque, speed, and load capacity come into play. Selecting an unsuitable rotor might lead to poor performance. It’s important to evaluate how each rotor type aligns with your project’s needs.
You can find various rotor designs in the market. Some may be more efficient, while others are cost-effective. Consider both the advantages and drawbacks of each option. This decision impacts your project's overall success. Thoughtful selection fosters better outcomes in functionality and reliability.
Understanding Stepper Motors and Their Components
Stepper motors are essential components in many automation projects, providing precise control over movement. Understanding their components can help streamline your project and enhance performance. At the core of a stepper motor is the rotor, which rotates in fixed increments. This allows the motor to achieve accurate positioning without needing feedback systems.
Different rotor designs offer various advantages. For example, a permanent magnet rotor is suitable for applications requiring high torque at low speeds. Meanwhile, a variable reluctance rotor can be lighter but may struggle with torque at higher speeds. When selecting a rotor, consider factors such as your project’s operational speed and required precision.
It is important to evaluate your specific needs. Some users may overlook practical aspects like power requirements or available space in their design.
In practice, implementing the right rotor involves trial and error. It’s common to discover that the initial choice doesn’t suit all operational conditions. Testing can reveal unexpected performance issues. For instance, in high-speed applications, a rotor might generate excessive heat, which can degrade performance. This reflection on component choices fosters a deeper understanding of stepper motor functionality, ultimately leading to better project outcomes.
Types of Stepper Motor Rotors and Their Applications
When selecting a stepper motor rotor, understanding the different types is essential. Generally, there are two main categories: permanent magnet (PM) rotors and variable reluctance (VR) rotors. PM rotors contain permanent magnets, providing high torque and precise positioning. They are ideal for applications requiring accurate motion control, such as robotics and CNC machines.
In contrast, VR rotors do not rely on magnets. Instead, they use varying magnetic fields to produce motion. This type often allows for higher step counts, which can achieve finer positioning. Nevertheless, VR rotors may also lack some of the torque characteristics found in PM types. This can affect their performance in specific applications, like 3D printing or laser cutting.
Choosing the right rotor hinges on your project's needs. Consider factors such as required torque, speed, and precision. Analyze trade-offs; for instance, a PM rotor may be more suitable for applications needing high holding torque. However, a VR rotor could be beneficial for low-cost settings. Always reflect on your project requirements and evaluate the unique characteristics of each rotor type before making a decision.
Key Factors to Consider When Selecting a Rotor
When selecting a stepper motor rotor, several key factors come into play. The size and weight of the rotor are crucial. A heavier rotor can provide more inertia, which helps maintain stability during rapid movements. However, it can slow down acceleration. Assess the weight according to your project needs. Balance is essential here.
Another factor is the industry application. Different projects may require different torque specifications. For example, robotics might need higher torque for precise movements, while simple display mechanisms may not. Understanding your project's demands is vital for optimal performance.
Material choice cannot be overlooked. Rotors made from high-quality materials often yield better performance and durability. However, sourcing such materials can be challenging. This necessitates research and testing to ensure reliability. Consider these aspects carefully to enhance the efficiency of your project.
How to Choose the Right Stepper Motor Rotor for Your Project? - Key Factors to Consider When Selecting a Rotor
| Key Factor |
Description |
Example Values |
| Rotor Type |
Different types of rotors designed for specific applications. |
Permanent Magnet, Hybrid, Variable Reluctance |
| Step Angle |
The angle the rotor moves with each step, affecting precision. |
1.8°, 0.9°, 7.5° |
| Torque Output |
The rotational force produced by the motor, crucial for load handling. |
0.5 Nm, 1.2 Nm, 2.5 Nm |
| Current Rating |
The maximum current the motor can handle, impacting performance and heating. |
1 A, 2 A, 3 A |
| Temperature Rating |
The operating temperature range for safe and efficient performance. |
-20°C to 50°C, 0°C to 70°C |
| Size and Weight |
Physical dimensions and weight considerations for integration into your project. |
42mm, 57mm, 86mm; 0.5 kg, 2.0 kg |
Compatibility of Rotor with Your Stepper Motor Drive
When selecting a stepper motor rotor for your project, compatibility with your motor drive is crucial. The rotor must match the electrical and mechanical characteristics of your stepper motor. This includes voltage ratings, resistance, and inductance. A mismatch in these parameters can lead to inefficient operation or even damage to the motor.
Additionally, watch out for the type of stepper motor you are using. There are unipolar and bipolar motors. Each type requires a specific rotor design to function correctly. Unipolar motors typically use rotors with five or six wires, allowing for simpler control but less torque. Bipolar motors may require more intricate rotor designs, offering greater torque and precision.
Don’t overlook the weight and inertia of the rotor as well. Heavier rotors can deliver higher torque but may slow down response times. A lighter rotor may increase speed but could lack the necessary power for certain applications. Reflecting on your project's needs is essential. Ensure that your rotor's characteristics align with your motor drive to achieve desired outcomes.
Balancing these trade-offs is crucial for optimal performance in your stepper motor applications.
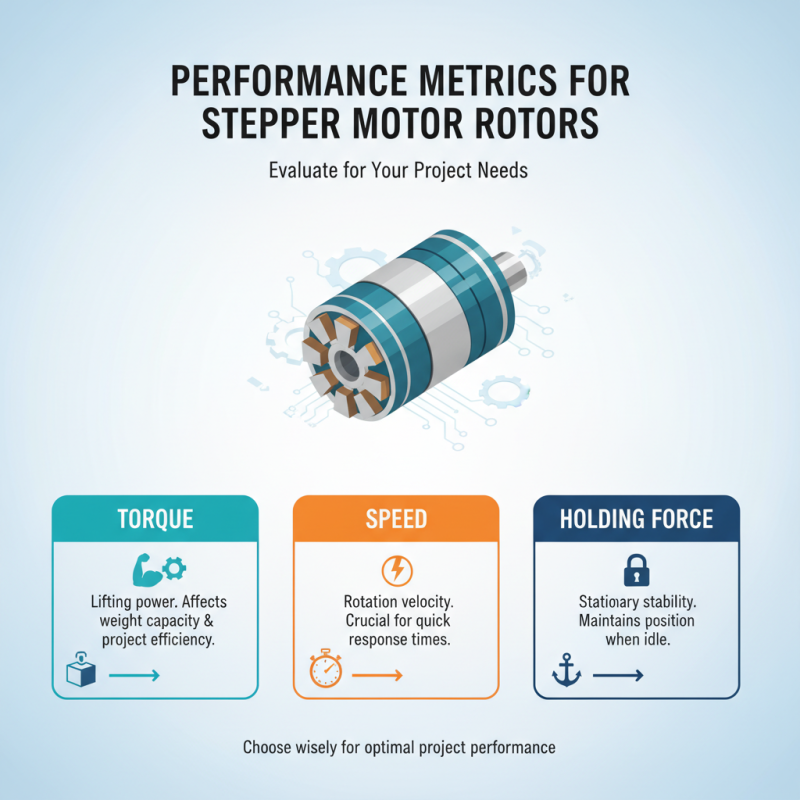
Performance Metrics to Evaluate for Your Project Needs
When selecting a stepper motor rotor for your project, performance metrics play a vital role. Evaluate parameters such as torque, speed, and holding force. Torque affects how much weight your motor can handle, which directly impacts your project's efficiency. Speed measurements are crucial, particularly if your application requires quick response times. Holding force is essential for maintaining position when the motor is idle.
Tips: Always match torque specifications with your application's requirements. Too little torque can lead to underperformance. Too much can cause overheating issues. Consider load fluctuations, as they help in determining the right size.
Think about step angle as well. Smaller angles provide finer control, but they can slow down the motor. Larger angles increase speed but reduce precision. If your project involves rapid movements, find a balance between speed and precision. Regular testing can help optimize performance.
It's essential to keep in mind the thermal characteristics of the motor. Stepper motors generate heat, and excessive heat can affect performance. Assess cooling methods based on your project's configuration. Make adjustments as needed to ensure optimal operational conditions.